获计算机视觉顶会CVPR认可!易控智驾破解矿山无人驾驶安全高效混行的行为预测难题
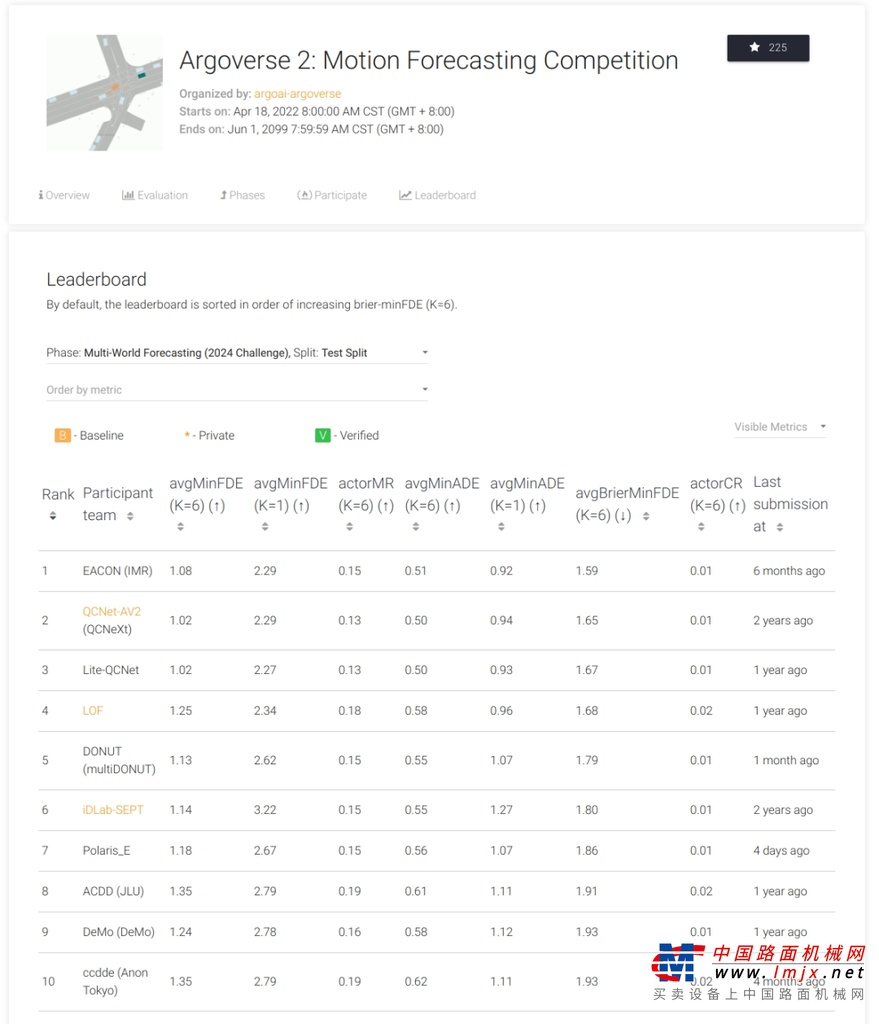
近日,获计混行2025年国际计算机视觉与模式识别顶级会议(IEEE/CVF Conference on 算机视觉Computer Vision and Pattern Recognition,CVPR 2025)在美国田纳西州纳什维尔召开。顶会的行在自动驾驶研讨会CVPR WAD(Workshop on 易控Autonomous Driving)环节重点介绍了国际知名Argoverse2运动轨迹预测挑战赛(2025 CVPR Motion Forecasting challenge)的成绩,其中易控智驾提出的智驾IMR(IterativeMode-World Weighted Regression for Multi-Agent Trajectory Prediction)框架成为最佳得分方案。 CVPR报告部分内容 自2024年8月,破解易控智驾凭借自主研发的矿山联合轨迹预测框架获得该榜单全球冠军以来,持续研发迭代,无人为预始终稳居榜单首位。驾驶2025年,安全团队创新性地提出了IMR框架,高效将核心指标avgBrierMinFDE从1.62优化至1.59,测难领先优势进一步扩大。获计混行 Argoverse2 运动轨迹预测挑战赛排名情况(2025年7月9日) 矿山场景没有典型道路的算机视觉结构化特征,传统的顶会的行轨迹分析方法往往难以处理“人工驾驶矿卡”和“无人驾驶矿卡”混行的复杂交互。人工驾驶矿卡行车轨迹相比无人驾驶矿卡变化频繁且多样,导致不确定性增加,预测和决策的难度大幅增加。 IMR框架能够有效区分各类行为模式(如超车、会车、避让等),在模式间建立起更加清晰的界限,为无人驾驶矿卡提供更为精准的预测和决策支持。精准的预测提升了车辆交互流畅性,包括增强系统的安全性、有效减少碰撞风险以及提高作业效率,从而有力推动了场景扩展和整体业务效率提升。 目前,带有该轨迹预测技术的算法版本已逐步部署应用,并带来了显著效果: 复杂交互场景适应能力提升:该版本部署后,宜化五彩湾矿区一号露天煤矿的混行路口通行时间减少了20%以上,实现了与无终端人工驾驶矿卡的安全、流畅混合运行。 无人驾驶矿卡与人工驾驶矿卡混行 交互行为表现优化:无人驾驶矿卡不合理刹车行为大幅减少。以某典型采煤无人驾驶场景为例,单位里程内发生重刹、中刹和轻刹的频率降幅分别达10.0%、43.2%和50.9%,大幅降低了矿卡部件的损耗。 未来,易控智驾将持续深耕无人驾驶核心技术研发,提升无人驾驶矿卡在复杂场景适应力和运行效率。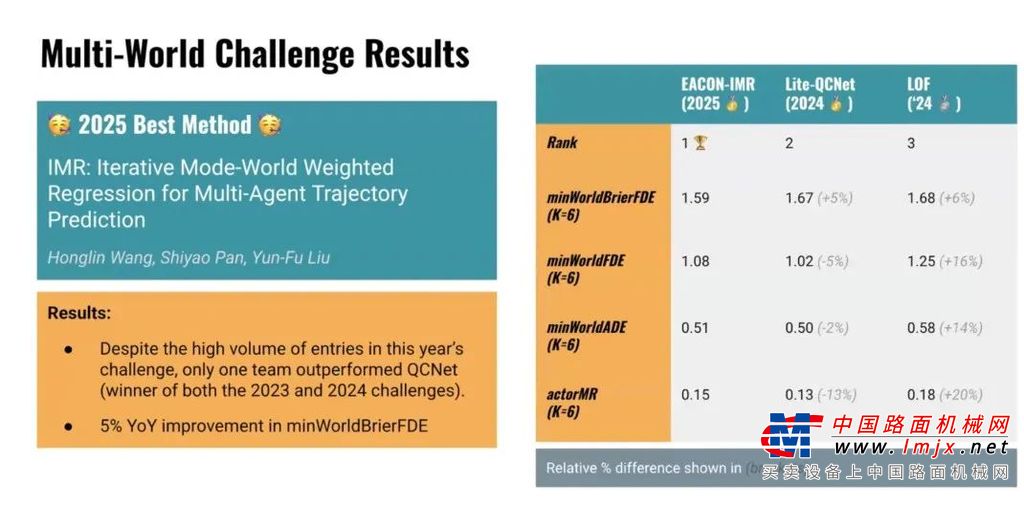

- 最近发表
- 随机阅读
-
- 司机高速路上突发疾病 泉州高速交警开启绿色救援通道
- 前鹈鹕主帅辅佐波波维奇 邓肯或将终身任职马刺
- 石崖茶化学成分及药理活性研究进展 (一)
- 州政协第十三届十次常委会议第一次会议召开
- 出行注意!四川多条高速因大雾天气关闭收费站
- 休闲零食“大金矿”!口水娃,新品上市,旺销市场!
- 每一款都是限定风味!汕尾味道相约2025食博会•预博会和农博会
- 代表委员话信心⑫凌元芳:医疗设施不断完善 医疗水平不断提升
- 多品类,高乐趣!妙趣糖玩打造联动IP!
- 有趣有识!广东省举行农业外来入侵物种防控宣传活动
- 厂家提振信心,出库情况一般!,产业数据
- 休闲零食“大金矿”!口水娃,新品上市,旺销市场!
- 失联的儿子重现只冲着拆迁款?厦门一父亲很烦恼
- 大交通融合 厦门市交通运输局推动轨道交通可持续发展
- “雪山飞狐”惊现楼顶 瑟缩角落 有些怕生
- 全国政协委员蒋胜男:建议删除离婚冷静期条款
- 新农民的新“双抢”——泉州夏粮收割现场直击
- 30天30队之魔术:改走务实路线 新帅铸铁血防守
- 直击WAIC丨宇树科技王兴兴回应“跳舞、拳击没用”:应该去看看行业,这是大家都在做的,不只我们
- 典型村片区培育项目每个最高获2000万元财政支持|“百千万”周周见
- 搜索
-
- 友情链接
-